
20年前,空间站安装加拿大2号机械手臂,详细高
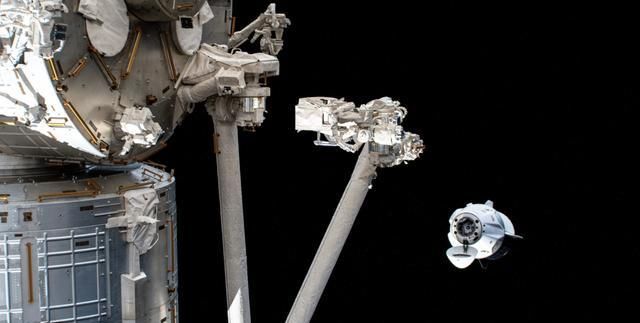
在这张2021年4月5日拍摄的照片中,加拿大2号机械手臂清晰可见,SpaceX的龙飞船也清晰可见。
20年前的今天,国际空间站(ISS)建设、扩建和维护的一个关键参与者,乘坐“奋进”号航天飞机和她的STS-100机组人员进入轨道。加拿大对空间站项目的贡献——57.7英尺长(17.6米)的加拿大2号,又称为“大臂”——是航天飞机自身遥控操作系统(RMS)的演变。
自2001年4月抵达加拿大以来,加拿大2号已经帮助建造了集成桁架结构(its),装载了发电太阳能电池板、电池和散热器,并安装了来自美国宇航局及其国际合作伙伴的加压和非加压组件。而在2009年9月至2021年2月期间,“大臂”号从美国作战航段(USOS)捕获、停泊、离泊和释放了不少于44艘无人驾驶货船。说加拿大2号卫星是空间站最重要的元素之一并不过分。
自从罗纳德·里根总统在1984年1月的国情咨文中最初提出由美国领导的空间站以来,加拿大通过其机器人装配和维护移动服务中心(MSC)一直是坚定的支持者和参与者。该空间站于1988年6月被命名为“自由号”,随后经过几次设计化身,以及痛苦的重新设计过程,最终与俄罗斯合作,并经历了国际空间站的重生。
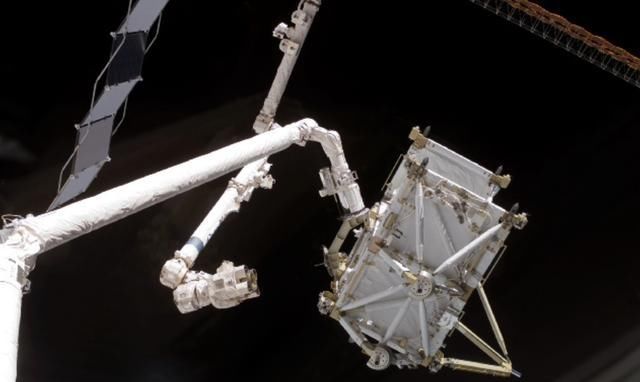
20年来,加拿大2号在国际空间站的建设中被证明是不可或缺的。在这里,在2006年12月,它可以看到在与航天飞机的行动'在P-5桁架节段安装期间,远程机械手系统(RMS)臂。
到1997年年中,比预定的开工时间提前不到一年,加拿大2—官方指定的空间站遥控操作系统(SSRMS)—为国际空间站装配任务6A(第六次专用航天飞机建造飞行)制定了基线,然后计划于1999年6月在亚特兰蒂斯号上发射。与RMS不同,大臂有七个自由度,通过两个自由度的存在“手腕” 还有两个“手,” 有能力“尺蠖” 通过与电源和数据抓斗装置(PDGFs)接口沿ISS结构。这使得它的触角远大于航天飞机。
1997年6月,美国国家航空航天局宣布了一批太空行走者,以迎接这一任务以及其他EVA和机器人的繁重任务。分配到6A的是克里斯·哈德菲尔德,他将成为加拿大'与美国国家航空航天局(NASA)合作的第一个太空行走者'是鲍勃·库比姆。在两次计划的撤离行动中,哈德菲尔德和库比姆的任务是装备新抵达的美国实验室,并安装重达3970磅(1800公斤)的加拿大2号机械手臂。
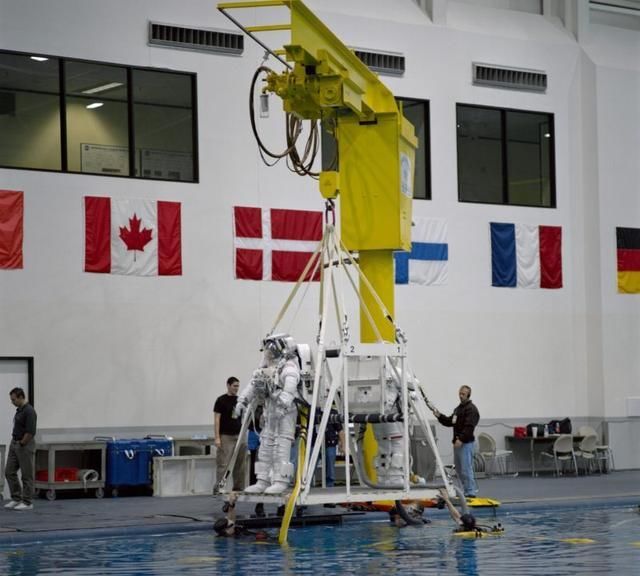
克里斯·哈德菲尔德(右)和斯科特·帕拉辛斯基准备在2000年12月进行水下训练。
哈德菲尔德在他的回忆录《宇航员地球生命指南》中写道:“这是世界上最昂贵、最复杂的建筑工具,要想让它投入使用,需要的不是一个EVA,而是两个EVA。”。“我是EV1,太空漫步领队,虽然我这辈子从没出过太空船。”
将太空行走与同时攀岩、举重、修理小型发动机和表演复杂的双人舞相比较,哈德菲尔德很快就认识到,这两种撤离行动都需要数百人精心编排。他写道:“过度规划是必要的,因为任何EVA都是危险的。”。“你在冒险进入一个完全不利于生活的真空地带。如果你遇到麻烦,你不能把它拖回太空船里。”在接下来的两年里,哈德菲尔德和库比姆致力于开发他们的两个eva,并成为一个紧密联系的团队。
国STS-100机组人员身着橙色套装,从左至右依次为尤里·隆恰科夫、肯特·罗明格、翁贝托·吉多尼、杰夫·阿什比和约翰·菲利普斯,身着白色EVA套装的斯科特·帕拉辛斯基(左)和克里斯·哈德菲尔德。图片来源:美国宇航局
与此同时,国际空间站建设工作的延误导致6A和其他几项任务滑向右侧,最终最快直到2000年年中。1999年9月,美国宇航局(NASA)资深太空行走者马克李(Mark Lee)从STS-98-Curbeam离职后,他被调到了原来的位置,经验丰富的航天飞机宇航员斯科特帕拉辛斯基(Scott Parazynski)也被调到6A号的哈德菲尔德(Hadfield)工作。
最后,当国际空间站的组装工作在拖延了两年后重新开始时,该任务接收了剩余的机组人员。到这一阶段,6A的目标已扩大到包括意大利建造的多用途后勤舱(MPLM)的第二次飞行,2000年2月,意大利宇航员翁贝托·吉多尼被派往哈德菲尔德和帕拉辛斯基。2000年9月,美国航天局任命宇航员杰夫·阿什比、约翰·菲利普斯和俄罗斯宇航员尤里·隆恰科夫(Yuri Lonchakov)为七名宇航员,由四届航天飞机老将肯特·罗明格(Kent Rominger)指挥。
下一篇:没有了