
激光雷达探测及三维成像研究进展(2)
3.1.扫描式三维成像激光雷达
扫描式三维成像激光雷达由单点激光测距系统配 以光束扫描装置构成,是目前发展相对成熟的三维成 像激光雷达技术,在地形测绘、大气环境检测、导航 和防撞、空间交会对接、汽车自动驾驶等领域的应用 十分广泛。扫描式激光雷达要求实现每个点的快速测 距,因此大多采用直接脉冲探测的方式。扫描装置的 作用是控制雷达光轴指向不同方向,依次测量目标上 各点的距离,同时记录光束指向的方位-俯仰角,这样 就可以得到目标的距离- 角度- 角度图像 (rang-angle-angle),又称为三维图像。需要注意的是, 激光雷达系统一般同时存在两个相互平行的光轴,即 发射光轴和接收光轴,扫描装置必须能够同步对这两 个光轴进行扫描,因此一般扫描式雷达多设计为发射接收同轴,并且为了保证接收到足够的回波功率,扫 描镜的光学有效孔径不能过小,这在很大程度上限制 了系统的扫描速度。为了提高系统的扫描速度,在单点扫描的基础上,人们发展了线扫描、点阵扫描等方式。?
目前,可用于激光雷达系统的扫描方式中较为成 熟的是机械式扫描,主要有摆镜扫描、万向节扫描、转镜扫描、双光楔扫描等类型,通过 电机驱动镜面转动,并利用几何光学的原理实现光束 的偏转,具有大扫描视场和高扫描效率,是近些年最 常见、应用最广泛也是最成熟的成像激光雷达扫描方 式。其中 MEMS扫描是最新发展的一种扫描方式, 其通过微型反射镜的快速振动来实现光束扫描,扫描 速度较传统的机械扫描可以大幅提高,同时很好地克 服了机械扫描系统体积大的缺点,可以实现系统的小 型化,因其扫描结构“微观”化,无可见的机械运动 部件,所以也被称为“混合固态”扫描方式,目前仍 存在接收光路较为复杂,微振部件影响系统使用寿命 的缺陷。对于 MEMS 扫描方式,最大的问题是,若 采用收发同轴扫描的方式,则受微型反射镜尺寸的限 制,其接收光学口径较小,探测距离受限;而若采用 发射扫描、大视场接收的方式,则背景噪声过强,同 样导致探测距离受限。双光楔扫描通过两块具有一定 楔角的光学平板绕光轴转动来实现折射光束的空间偏 转,适用于较大口径的激光雷达系统,一般用于远距 离探测成像。另外,近年来光学相控阵技术[26](optical phase array,OPA)的发展为激光发射光束的快速扫描 提供了一种新的手段,然而激光雷达除发射外还需对 回波信号进行同步接收,目前技术上还有待成熟。扫 描成像激光雷达从搭载平台来看主要分为星载扫描成 像激光雷达、机载扫描成像激光雷达、车载成像激光雷达等。
3.1.1 星载成像激光雷达
星载扫描成像激光雷达主要用于空间交会对接、飞行器的导航着陆以及星载对地三维成像等。2005年MDA Space Mission[27]以及2013年中国科学院上海光学精密机械研究所[28]均提出使用二维扫描镜作为扫描机构,如图 3所示,分别具有10°×10°、30°×30°、120°×120°的最大扫描视场角,并利用二维扫描镜扫描角度可调的特点,实现空间自主捕获、定位和追踪合作目标,激光雷达系统工作距离覆盖范围从十几米到十几千米。

图3. (a) MDA Space Mission和Optech公司联合设计的星载激光雷达;(b)中国科学院上海光学精密机械研究所提出的星载激光雷达系统
2011年欧洲航天局(The European Space Agency)提出使用万向节作为扫描机构,实现了20°×20°的扫描角度,成像帧频不小于1 Hz,如图 4所示。机械扫描三维成像激光雷达因其体积小、质量轻、功耗低、精度高、技术成熟等优点,广泛应用于空间交会对接和飞行器导航着陆。
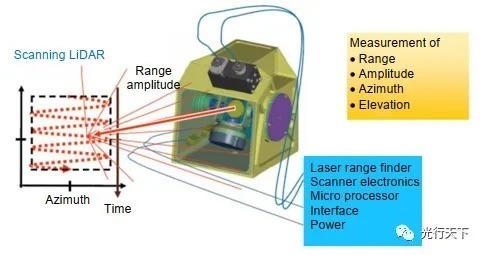
图4.欧洲航天局设计的星载激光雷达系统
我国的空间交会激光雷达虽然起步较晚,但发展迅速,由中国科学院光电技术研究所和中电科27所联合研制的激光雷达已多次成功应用于我国空间站和神舟系列飞船的交会对接,技术指标已达国际领先水平。
美国国家航天局(NASA)一直致力于发展地球观测系统,测量冰盖质量平衡、冰盖高度和海冰厚度,云和气溶胶高度,以及陆地地形和植被特征等研制的ICESat和ICESat2星载激光雷达成像系统均已成功发射,完成既定任务[30-34]。ICESat在单像素测距的基础上,利用卫星平台的运动,实现对地表的单点扫描成像。ICESat于2003年1月13日发射成功,采用线性探测体制,在轨工作7年后,于2010年由于主要载荷失效最终导致任务终结,完成了对地球表面绝大部分地区的激光测绘工作。ICESat2同时发射三对六束激光,采用光子计数探测,每对间隔3.3 km,沿轨光斑间隔70 cm,测量地形高度变化小于4 mm。ICESat2已于2018年9月15日发射成功,预计在轨工作3年。为了实现更高的横向测量精度,NASA正在研制LIST(LiDAR surface topography)雷达系统,其采用1000像元的光子计数探测器方案,将能够实现5 m的横向分辨率和分米级的测距精度[35]。图 5为NASA星载激光雷达系统发展路线图。
下一篇:没有了